


- ◆ 焊割工具
- ◆ 焊接設備
- ◆ 焊接配件
- ◆ 機器人(rén)焊接
- ◆ 單體機器人(rén)焊接系統
- ◆ 機器人(rén)标準焊接系統
- ◆ 經濟型标準機器人(rén)系統
- ◆ 機器人(rén)激光(guāng)焊接系統
- ◆ 中厚闆機器人(rén)焊接系統
- ◆ 機器人(rén)切割系統
- ◆ 機器人(rén)周邊裝置
- ◆ 機器人(rén)教學系統
- ◆ 焊絲焊材
- ◆ 焊劑
- ◆ 結構鋼焊條
- ◆ 熱(rè)強鋼焊條
- ◆ 低溫鋼焊條
- ◆ 不鏽鋼焊條
- ◆ 堆焊焊條
- ◆ 鑄鐵焊條
- ◆ 管道焊接專用(yòng)焊條
- ◆ 埋弧焊絲
- ◆ 藥芯焊絲
- ◆ 實心焊絲
- ◆ 不鏽鋼焊絲
- ◆ 氩弧焊絲
- ◆ 堆焊焊帶
- ◆ 焊接襯墊
- ◆ 氣動工具
- ◆ 電動工具
- ◆ 勞防用(yòng)品
- ◆ 氣體減壓器
- ◆ 氧氣/乙炔管


機器人(rén)火焰切割系統的(de)效率高(gāo)、操作簡單,能夠實現各種位置的(de)切割和(hé)對(duì)應各種外形複雜(zá)的(de)零件,廣泛應用(yòng)于鋼闆下(xià)料、焊接坡口的(de)切割。主要用(yòng)于切割各種碳鋼和(hé)普通(tōng)低合金鋼
機器人(rén)介紹
關于火焰切割
火焰切割的(de)定義
是利用(yòng)可(kě)燃氣體同氧混合燃燒所産生的(de)火焰分(fēn)離材料的(de)熱(rè)切割,又稱氧氣切割或氣割。切割時(shí),火焰在起割點将材料預熱(rè)到燃點,然後噴射氧氣流,使金屬材料劇烈氧化(huà)燃燒,生成的(de)氧化(huà)物(wù)熔渣被氣流吹除,形成切口。
火焰切割的(de)原理(lǐ)
是利用(yòng)可(kě)燃氣體與氧氣混合燃燒的(de)火焰熱(rè)能将工件切割處預熱(rè)到一定溫度後,噴出高(gāo)速切割氧流,使金屬劇烈氧化(huà)并放出熱(rè)量,利用(yòng)切割氧流把熔化(huà)狀态的(de)金屬氧化(huà)物(wù)吹掉,而實現切割的(de)方法。金屬的(de)氣割過程實質是鐵在純氧中的(de)燃燒過程,而不是熔化(huà)過程。
常用(yòng)氣體
火焰切割用(yòng)的(de)氧純度應大(dà)于99%;可(kě)燃氣體一般用(yòng)乙炔氣,也(yě)可(kě)用(yòng)石油氣、天然氣或煤氣。用(yòng)乙炔氣的(de)切割效率最高(gāo),質量較好,但成本較高(gāo)。
标準火焰切割機器人(rén)系統
機器人(rén)火焰切割系統的(de)效率高(gāo)、操作簡單,能夠實現各種位置的(de)切割和(hé)對(duì)應各種外形複雜(zá)的(de)零件,廣泛應用(yòng)于鋼闆下(xià)料、焊接坡口的(de)切割。主要用(yòng)于切割各種碳鋼和(hé)普通(tōng)低合金鋼。
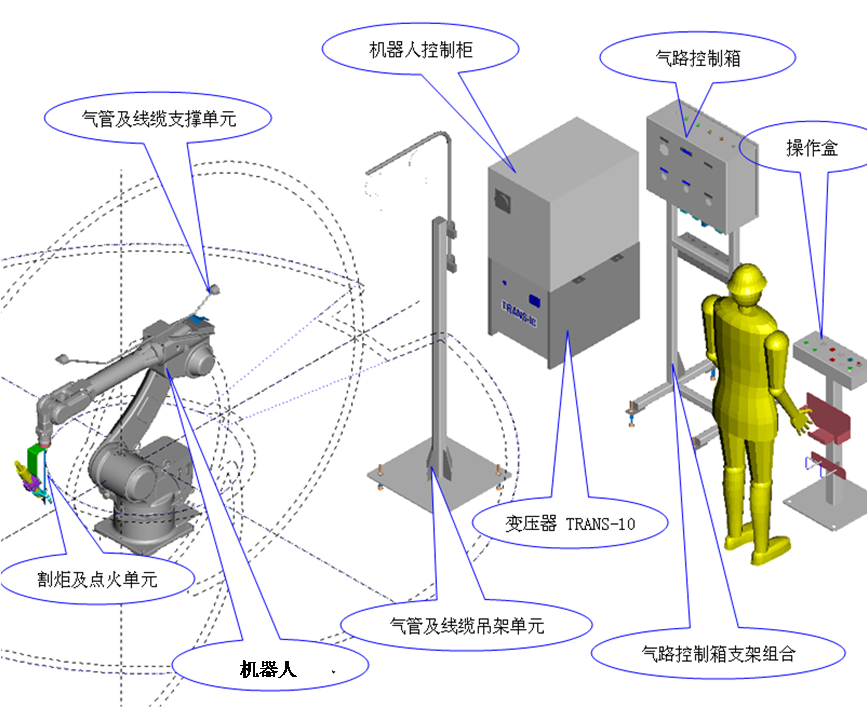
系統構成
系統型号
| 型号 | 适用(yòng)燃燒氣體 | 備注 |
| YA-TY1960 | 丙烷 | 多(duō)級氣路 |
配置構成
| 序号 | 名稱 | 型号及規格 | 數量(套) | |
| 1 | 機器人(rén) | 機器人(rén)本體 | TL1800 | 1 |
| 機器人(rén)控制櫃 | -- | 1 | ||
| 機器人(rén)示教盒 | -- | 1 | ||
| 2 | 變壓器 | TRANS-10 | 1 | |
| 3 | 火焰切割系統 | 氣路控制箱箱及氣路系統 | YA-TY1960 | 1 |
| 氣路控制箱支架組合 | 1 | |||
| 割炬單元 | 1 | |||
| 點火單元 | 1 | |||
| 控制模塊安裝盒(控制系統集成在機器人(rén)控制櫃内) | 1 | |||
| 氣管及線纜支撐單元 | 1 | |||
| 氣管及線纜吊架單元 | 1 | |||
| 操作盒 | 1 | |||
| 4 | 機器人(rén)底座 | -- | 1 | |
注:上表中所示爲單套工作站所含部品數量
機器人(rén)本體
可(kě)搭載的(de)機器人(rén)本體爲TL1800

機器人(rén)示教器和(hé)控制器
 G3 |  TP |
方便的(de)操作盒
火焰切割系統的(de)控制部分(fēn)的(de)核心爲日本三菱PLC,通(tōng)過對(duì)操作盒輸入信号的(de)處理(lǐ)以及和(hé)機器人(rén)I/O的(de)信号交互,實現對(duì)氣體截止閥手動/自動的(de)打開與關斷控制。

接觸傳感器(選配)
機器人(rén)火焰切割系統可(kě)以加載用(yòng)于尋找割口的(de)接觸傳感器(選配) ,有效防止新裝載工件因爲位置“再現性”不好而引起的(de)切割偏差。
功能詳述
V型布局坡口切割工作站
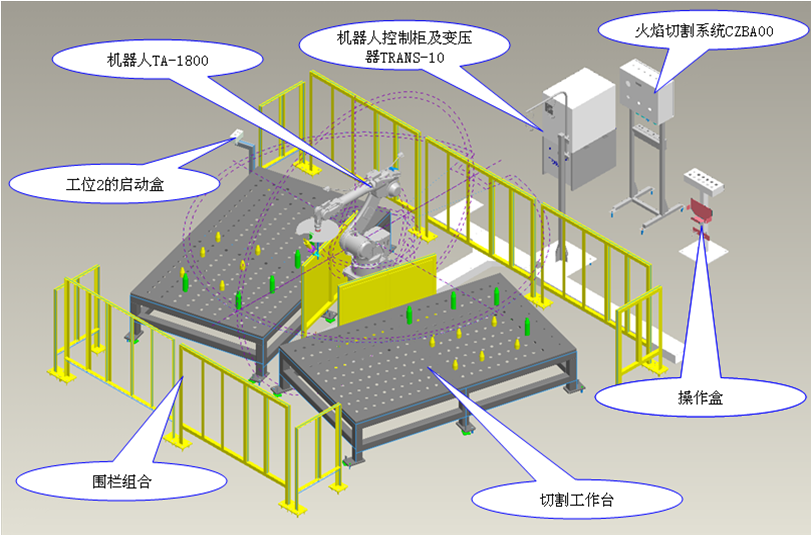
系統組成
本切割系統由松下(xià) TL系列機器人(rén)、高(gāo)壓接觸觸感器、火焰切割系統、切割工作台、接渣小車、操作盒以及安全圍欄等構成。 主要切割工件是挖掘機動臂上的(de)側闆。
系統特點
高(gāo)負載、多(duō)自由度、工作範圍大(dà)、精度高(gāo)
高(gāo)負載、多(duō)自由度、工作範圍大(dà)、精度高(gāo)
用(yòng)松下(xià)TL-G3系列機器人(rén),該機器人(rén)末端負載8Kg,具有6個(gè)關節自由度,手臂伸展半徑超過1800mm,重複定位精度在±0.08mm以内,完全滿足火焰切割的(de)需求
功能精确
搭載高(gāo)級功能
信号交互處理(lǐ)更智能
高(gāo)端割炬
人(rén)性化(huà)工作台設計
方便易操作的(de)操作盒
工作流程
雙手按下(xià)A工位的(de)啓動開關,機器人(rén)移動到自動點火裝置處,發出點火指令,點燃預熱(rè)火焰先對(duì)A工位工件預熱(rè)。完成預熱(rè)時(shí)間後再次發出點火指令,點燃切割火焰。先對(duì)工件進行去除毛邊的(de)切割,切割完畢後,變換割炬傾角,對(duì)工件進行坡口切割。
啓動A工位的(de)程序後,可(kě)以在B工位更換切割工件,并按下(xià)預約按鈕。當A工位切割完畢後,機器人(rén)繼續執行B工位的(de)切割。
實施效果
工人(rén)的(de)勞動條件和(hé)強度均得(de)到改善,隻需要上下(xià)工件和(hé)按動按鈕即可(kě)實現工件的(de)切割
機器人(rén)切割的(de)坡口光(guāng)潔度高(gāo),坡口鈍邊基本一緻,并且能夠适應多(duō)種工件的(de)切割,切割效率高(gāo),切割後的(de)工件僅需去簡單地除飛(fēi)刺毛邊後即可(kě)進行焊接
機器人(rén)可(kě)連續工作;産品生産周期更加明(míng)确,方便了(le)用(yòng)戶安排生産計劃。機器人(rén)切割系統的(de)應用(yòng)不僅提高(gāo)了(le)産品的(de)科技含量,給客戶也(yě)帶來(lái)了(le)切實的(de)效益
